We aim to present all of our sample implementations in our GitHub Repository. The codes of our recent work are also available on Sensor Fusion Group’s webpage
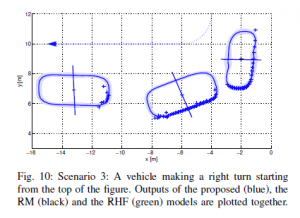
Extended Target Tracking Using Gaussian Processes
Recent Work
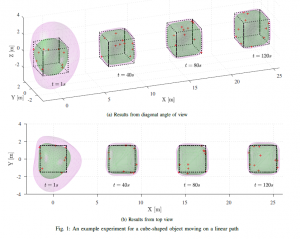
3D Extended Object Tracking Using Recursive Gaussian Processes
Multi-Ellipsoidal Extended Target Tracking Using Sequential Monte Carlo
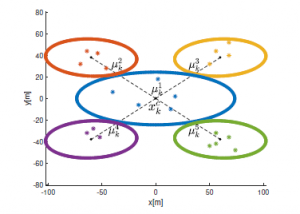
In this paper, we consider the problem of extended target tracking, where the target extent cannot be represented by a single ellipse accurately. We model the target extent with multiple ellipses and solve the resulting inference problem, which involves data association between the measurements and subobjects. We cast the inference problem into sequential Monte Carlo (SMC) framework and propose a simplified approach for the solution. Furthermore, we make use of the Rao-Blackwellization, aka marginalization, idea and derive an efficient filter to approximate the joint posterior density of the target kinematic states and target extent. Conditional analytical expressions, which are essential for Rao-Blackwellization, are not available in our problem. We use variational Bayes technique to approximate the conditional densities and enable Rao-Blackwellization.
Extended Object Tracking and Shape Classification
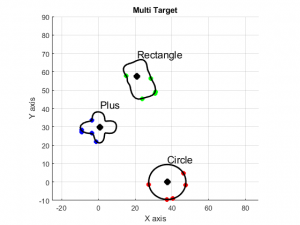
Recent extended target tracking algorithms provide reliable shape estimates while tracking objects. The estimated extent of the objects can also be used for online classification. In this work, we propose to use a Bayesian classifier to identify different objects based on their contour estimates during tracking. The proposed method uses the uncertainty information provided by the estimation covariance of the tracker.