For my third homework as part of the Computer Graphics 2 course, I implemented grass rendering in OpenGL using the geometry shader, Bezier curves, and Perlin noise. In this blog post, I will explain my process of learning and implementing this homework.
Learning More About OpenGL
Before I started implementing this homework, I thought that it might be better if I first had a better grasp on how geometry shaders worked so I took a look at various tutorials on geometry shaders and found some interesting sources. While this section is not really important, I found some sources that I thought were really cool and I just wanted to share them somehow.
While looking through some posts on Reddit, I found a comment under this post suggesting a webpage called The Book of Shaders by Patricio Gonzalez Vivo & Jen Lowe. It is an interactive website that explains how shaders work in detail, showcases some shaders and their results, and even allows you to rewrite those shaders and display your results in real-time. Below is a little sample shader in the “Uniforms” section that displays a flashing animation:

I also found a blog post called Bezier Curves and Picasso by Jeremy Kun where he explains the process in which he draws Pablo Picasso’s drawing called “Dog” using only Bezier curves. It also has an interactive demo that allows you to edit the control points of each curve, leading to some interesting results:

I understand that the sources I talked about above aren’t really related to the homework. I’ll start explaining my implementation process in the section below.
Grass Rendering Implementation
To implement the grasses, I decided to first randomly generate 1000 grasses with random x and z values with 3 control points, then sample the wind value from a temporary function that oscillates with time, and set the control point values from the geometry shader. I first rendered a bunch of simple green-colored line strips:
I though this was a decent starting point. Even with three control points the grasses looked decent enough. But I only implemented this as a starting point, I’m aware that these are not Bezier curves. I used the function below to generate some oscillating values with time:
float getWindVelocity(float x, float y, float time) {
return 0.1 * cos(0.1 * x + time*2.0) * sin(0.1 * y + time*2.0);
}I made use of ChatGPT to generate this function since this was supposed to be just a placeholder for the actual Perlin noise implementation (or so I thought at the time).
After this, I decided to implement the wind speed increase/decrease functionality, which was quite simple. I simply scaled the time variable with a variable that changed with input in the sampling function. Later on, I decided to scale the entire output instead, as it provided smoother swaying motions. In the demonstration below, I utilized the former version:
At this point, I needed to test my implementations with more grass blades that were spread over a larger area, but not all of the grasses were visible. So before I proceeded further with the main implementation, I added camera movements and rotations. The movement part was rather simple, to go forward or backward, simply updated the position by multiplying the Front vector with the speed value I set and added it to the position. To go left or right, I calculated the left and right vectors by taking the cross products of the Up and Front vectors.
The rotation part was a bit trickier. I was initially planning on using quaternions as was showcased in one of our lectures, but I couldn’t get a good grasp on the mechanism and I didn’t have much time, so I went for a simpler solution. I simply calculated the offset from the previous position, incremented the yaw and pitch values with the offsets (making sure that the pitch degree didn’t go over 89 degrees or below -89 degrees), and updated the Front and Up vectors with these values. Below is the implementation:
void mouse_callback(GLFWwindow* window, double xpos, double ypos) {
if (firstMouse) {
lastX = xpos;
lastY = ypos;
firstMouse = false;
}
float xoffset = xpos - lastX;
float yoffset = lastY - ypos; // Reversed since y-coordinates range from bottom to top
lastX = xpos;
lastY = ypos;
xoffset *= sensitivity;
yoffset *= sensitivity;
yaw += xoffset;
pitch += yoffset;
// Constrain the pitch
if (pitch > 89.0f)
pitch = 89.0f;
if (pitch < -89.0f)
pitch = -89.0f;
glm::vec3 front;
front.x = cos(glm::radians(yaw)) * cos(glm::radians(pitch));
front.y = sin(glm::radians(pitch));
front.z = sin(glm::radians(yaw)) * cos(glm::radians(pitch));
cameraFront = glm::normalize(front);
}And here is how it looks:

I was first going to implement the rotation by clicking and dragging on the screen so that the user could resize the window, or make it fullscreen. But unfortunately, I couldn’t really figure it out and I didn’t have much time left, so I had to move on. If resizing is absolutely necessary, the glfwSetInputMode at line 463 could be set to GLFW_CURSOR_NORMAL instead of GLFW_CURSOR_DISABLED. This would prevent the camera from being able to rotate completely because when the mouse reenters the window, the camera gaze starts from the initial position (I’m not sure why). By making the window fullscreen, you can rotate and move around enough to see the entire field.
Now I needed to render the blades as actual Bezier curves. I implemented the Bezier curves by first assigning four equally spaced control points to each grass blade starting from the ground coordinate to the assigned height value. Then, I interpolated 10 vertices between the starting point and the ending point using the functions in the course slides. When I rendered the grasses using triangle strips, I increased the amount to 21 segments. Below is how it looks:

I then rendered the grasses using triangle strips. This part was rather simple as well, I just rendered each segment using 2 vertices that went narrower as it grew higher. Since the deadline is technically not over yet and this is potentially an important part of the homework, I won’t post the implementation itself but here’s how it looks:
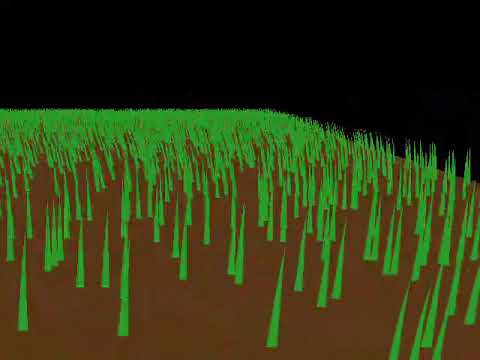
Now it was time to implement the keyboard functionalities requested as part of the homework. For changing colors, I made it so that the colors of the grasses rotated between three constant RGB values (green, yellow, white). Because not much was specified for this part, I didn’t waste too much time with it. I also added a ground mesh for a bit more aesthetic, but it didn’t really help much:
I decided to change the heights of the grasses between five values where each time the height is increased, it is scaled by 1.5 and vice versa. In terms of implementation, not much was needed since most of the processing was done on the geometry shaders. I just needed to change the stored grass blade data and reupload it to the VBO. I also decided to add some variance to the starting heights of the grasses to give it a more natural look. Here’s how it looks:

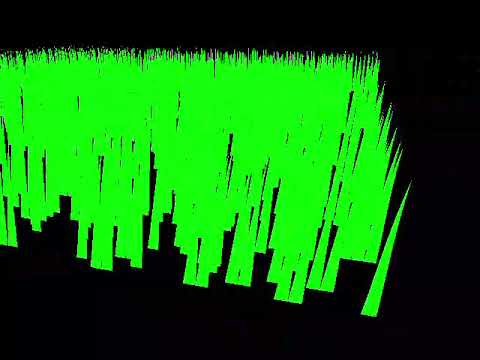
Finally, it was time to implement the Perlin noise functionality I had been procrastinating. Implementing the noise function itself wouldn’t be much of a problem, but I didn’t really know how I should sample from it as time went on. I first implemented the Perlin noise inside the geometry shader using the definitions given in the course slides yet again. While I first planned on implementing it using 2D coordinates, the slide specified that the 3D positions should be used to sample from the noise, so I simply went along with it. In hindsight, it was probably for grass field implementations that were done on a non-level surface (unlike mine), so perhaps my implementation would have looked a bit better if I used 2D coordinates but I’m not really sure. The demonstration below shows the grasses sampling from the first version of my Perlin noise implementation where I tried to add some dependency on time with a simple sin function, wind *= sin(time * windMult):

This result was quite unacceptable, but I didn’t really get a sense of how I could fix this. I realized the blades would bend one way while swaying the other, so I scaled the sampling down a bit at the lower parts of the blade. While this did fix the bending issue, the overall swaying animation looked way too stiff even if I capped the amount of swaying at a certain level.
As I was out of both ideas and time, I decided to utilize my so-called ‘temporary’ sampling function again to create a more natural-looking animation. It’s not that I didn’t use my Perlin noise implementation; I did, but instead of the coordinates, I passed the sampled noise values to the oscillating function. The outcome was serviceable, but obviously there is still much that could be done:

I also did some fps calculations on my own computer for the final version (fps was capped at 60 on the ineks):
| FPS (Window mode) | FPS (Fullscreen) | |
| 10,000 blades | 950-1000 | 350 |
| 20,000 blades | 500 | 200-250 |
| 40,000 blades | 300 | 150-170 |
| 80,000 blades over larger area | 250 | 90-120 |
And here’s a guide on the controls of the scene just in case. I have also added the guide in the readme file:
Q: Close the scene.
A/D: Increase/Decrease the wind speed. (0 to 3)
W/S: Increase/Decrease the grass blade length (0 to 4)
E/R: Cycle through the grass colors.
Arrow Keys: Camera movement.
This concludes my grass rendering implementation on OpenGL using Bezier curves, geometry shaders, and Perlin noise. While the base requirements have been met, there are still many features that could be added (skybox, non-level ground distribution) and areas that could be improved further (noise sampling, shading of the grasses). But, I still learned quite a bit from this assignment.